關(guān)鍵詞:負載口獨立;機液壓差補償;能耗;運動控制
0 引言
液壓傳動與控制技術(shù)由于其結(jié)構(gòu)簡單、輸出重量比大、反應(yīng)靈敏、傳動平穩(wěn)、響應(yīng)快等特點在農(nóng)業(yè)機械、工程機械、鋼鐵工業(yè)等領(lǐng)域得到了廣泛應(yīng)用。
傳統(tǒng)的液壓系統(tǒng)由于其采用了一根閥芯同時控制著進、出口油路,產(chǎn)生了多余的節(jié)流損失,導(dǎo)致了系統(tǒng)能耗大、效率低,因此1987 年德國的 Backe 教授提出了負載口獨立控制技術(shù), 即利用兩個獨立的閥分別控制著進、出口油路,從而盡量降低節(jié)流損失, 達到節(jié)能的目的[1]。此后,眾多學(xué)者對負載口獨立控制技術(shù)進行了深入研究,在組合方式、控制方法、實驗研究上取得了一定成果[2-4]。文獻[5]提出了在負載口獨立控制系統(tǒng)中利用機液壓差補償方法,不但可以提高系統(tǒng)的可靠性,而且具有一定的節(jié)能特性。
因此, 本文將分析負載口獨立液壓系統(tǒng)的工作原理及結(jié)構(gòu)特點,對比電液壓差補償方法和機液壓差補償方法的特點,采用機液壓差補償原理,選用相關(guān)液壓元件,設(shè)計基于機液壓差補償?shù)呢撦d口獨立控制閥及多執(zhí)行器液壓系統(tǒng),并分析其工作原理, 搭建試驗平臺。
1 結(jié)構(gòu)組成與工作原理:
1.1 傳統(tǒng)閥控液壓系統(tǒng)工作原理
傳統(tǒng)的閥控液壓系統(tǒng)普遍采用三位四通滑閥的結(jié)構(gòu),如圖 1 所示,利用一個多邊節(jié)流的控制閥芯 x 同時控制著液壓執(zhí)行器的進、出口油路,在進口節(jié)流調(diào)速的過程中,出口同時進行節(jié)流,這就造成了多余的出口節(jié)流損失,因此,傳統(tǒng)控制閥的結(jié)構(gòu)形式造成了重復(fù)節(jié)流損失,使得系統(tǒng)在一定程度上能耗上升,效率降低。同時,由于閥芯和閥體的結(jié)構(gòu)決定了中位機能,一旦控制閥確定, 中位機能即確定,在實際的應(yīng)用過程中,中位機能不能隨著應(yīng)用工況的需求而改變,因此,傳統(tǒng)閥控系統(tǒng)的工況適應(yīng)性較差。
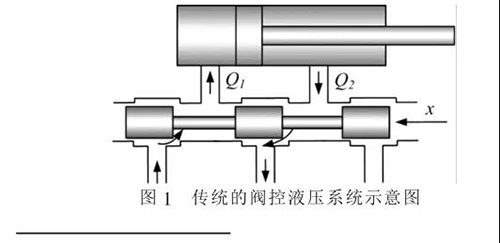
圖 1 傳統(tǒng)的閥控液壓系統(tǒng)示意圖
1.2 負載口獨立液壓系統(tǒng)工作原理
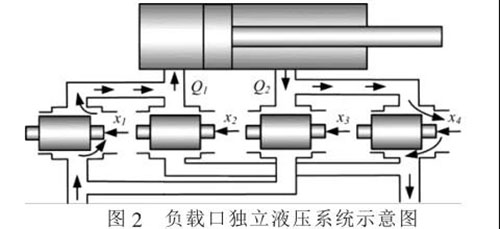
負載口獨立液壓系統(tǒng)工作原理,如圖 2 所示,將原有的單個控制閥芯 x,分別利用四個控制閥芯 x1、x2、x3、x4 替代,從而完成對液壓執(zhí)行器進、 出口油路的獨立控制, 根據(jù)液壓執(zhí)行器工況需求,通過不同的控制邏輯對相應(yīng)的施控制,在進口控制閥節(jié)流調(diào)速控制的同時,出口控制閥進行柔性控制,從而可以避免傳統(tǒng)閥控液壓系統(tǒng)中所出現(xiàn)的重復(fù)節(jié)流損失,進一步降低了系統(tǒng)能耗, 實現(xiàn)閥控液壓系統(tǒng)節(jié)能。
1.3 負載口獨立液壓系統(tǒng)布局形式
負載口獨立液壓系統(tǒng)的布局形式主要有兩種,如圖 3 所示, 國內(nèi)外學(xué)者所研究的布局形式均是由這兩種布局形式進行變形與改進而來。圖 3(a)所示為 4-2/2 型液壓布局形式,利用四個 2/2 比例閥進行組合, 控制 1 個液壓執(zhí)行器;圖 3(b) 所示為 2-3/3型液壓布局形式,利用兩個 3/3 比例閥進行組合, 控制 1 個液壓執(zhí)行器。 兩種布局形式各有特點,4-2/2 型具有較高的控制柔性,可以實現(xiàn)多種中位機能,但是成本較高、控制難度較大;2-3/3 型布局形式成本相對較低、控制難度相對小, 但控制柔性較低, 實現(xiàn)的中位機能種類較少。
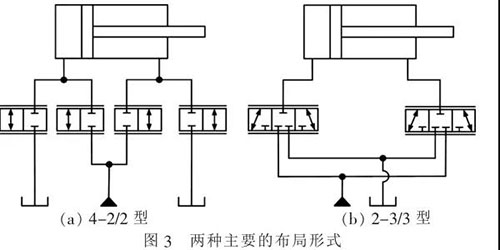
(a) 4-2/2 型(b) 2-3/3 型
2 負載口獨立液壓系統(tǒng)運動控制方法:
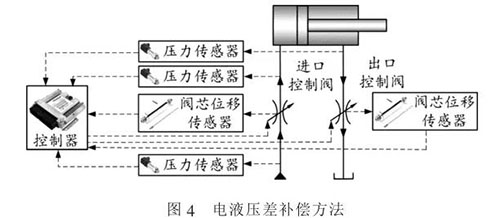
2.1 電液壓差補償方法
無論是傳統(tǒng)的液壓系統(tǒng),還是新型的負載口獨立液壓系統(tǒng), 其中一個最為重要的功能是運動控制。運動控制是一個難點,國內(nèi)外學(xué)者在研究負載口獨立液壓系統(tǒng)時, 多采用電液壓差補償方法,所謂負載口獨立控制系統(tǒng)的電液壓差補償方法,如圖 4 所示,通過 3 個壓力傳感器檢測進口控制閥兩端的壓力、出口控制閥的壓力, 計算閥口壓降, 利用壓力——流量特性方程, 根據(jù)實際工況, 通過控制器對進、出口控制閥的閥芯進行柔性控制, 從而實現(xiàn)變負載工況下液壓執(zhí)行器的運動控制。
然而, 負載口獨立液壓系統(tǒng)是一個典型的多輸入多輸出控制系統(tǒng), 存在著壓力、流量的耦合控制, 是一個復(fù)雜多變的控制系統(tǒng)。電液壓差補償方法多采用成本較高的比例伺服閥,通過內(nèi)置的閥芯位移傳感器檢測閥芯位移并以電反饋的方式實現(xiàn)壓力、流量的耦合控制,此種電液壓差補償方法復(fù)雜,計算量大,對控制器性能要求較高, 并且需要大量的試驗進行性能調(diào)試, 因此,很難在現(xiàn)有的工業(yè)機械中進行推廣應(yīng)用,而工程機械或農(nóng)業(yè)機械中均采用沒有內(nèi)置閥芯位移傳感器的比例閥或開關(guān)閥, 現(xiàn)有的研究不滿足應(yīng)用條件,其工程應(yīng)用更進一步受到了限制。
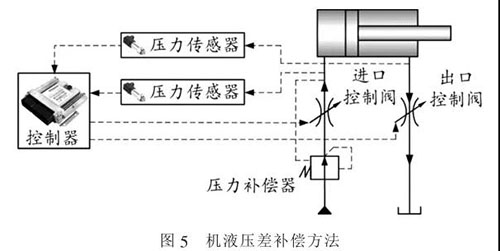
2.2 機液壓差補償方法
為了克服電液壓差補償方法的缺點, 本文采用機液壓差補償方法,對負載口獨立液壓系統(tǒng)進行設(shè)計。所謂機液壓差補償方法,如圖 5 所示,采用壓力補償器對進口控制閥的壓差進行補償, 同時, 通過 2 個壓力傳感器對進、出口控制閥的壓力進行檢測, 通過控制器制定相應(yīng)的進口控制閥和出口控制閥的控制方法。相比于電液壓差補償方法,減少了信號檢測點,避免了閥芯位移檢測, 增強了系統(tǒng)的魯棒性, 便于變負載工況下控制策略的制定,便于今后在農(nóng)業(yè)機械及工程機械中進行推廣應(yīng)用。
3 負載口獨立液壓系統(tǒng)設(shè)計:
3.1 負載口獨立控制閥設(shè)計
根據(jù)前文所述,采用機液壓差補償方法,設(shè)計負載口獨立控制閥,原理圖和三維設(shè)計圖,如圖 6 所示。采用 5 個二位二通比例閥 4 作為主控制閥,可以實現(xiàn)相應(yīng)的邏輯控制、多種中位機能以及流量再生功能;采用壓力補償器 5 補償進口閥兩端的前后壓差,從而實現(xiàn)流量穩(wěn)定控制;采用兩個二位三通換向閥 2 和梭閥 6 實現(xiàn)工作油腔的壓力傳遞到負載敏感口 LS;采用兩個二次補油閥 1,可以實現(xiàn)當(dāng)液壓執(zhí)行器兩腔吸空時進行補油; 采用保持閥 3 可以實現(xiàn)負載保持功能; 除此以外, 設(shè)置了兩個供油口P1、P2,兩個負載敏感口 LS1、LS2,兩個回油口 T1、T2,以及兩個測壓口 Ma、Mb。
當(dāng) A 口進油、B 口回油時, 其工作原理如下:二位二通比例閥 4.3、二位二通比例閥 4.5、二位三通換向閥 2.1、保持閥 3 同時打開則壓力油從供油口 P 1 或 P 2 進油,經(jīng)過壓力補償器 5 ,再經(jīng)過二位二通比例換向閥 4.3 達到 A 口, 驅(qū)動液壓執(zhí)行器運動,通過 B 口回油, 經(jīng)過保持閥 3, 再經(jīng)過二位二通比例閥 4.5 到回油口 T1、T2,同時,A 口工作壓力通過二位三通換向閥 2.2 和 2.1,一路流入壓力補償器 5 的比較口, 另一路通過梭閥 6 流回負載敏感 LS1 或 LS2。
當(dāng) B 口進油、A 口回油時, 其工作原理與上述工作原理相似,所不同的是,二位二通換向閥 4.2 和 4.4 工作。
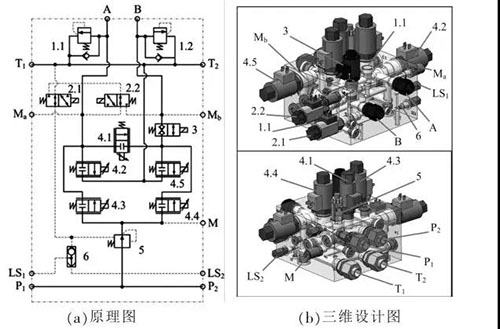
1.過載補油閥;2.二位三通換向閥;3.保持閥;4.二位二通比例閥;5.壓力補償器;6.梭閥。
圖 6 負載口獨立控制閥原理圖和三維設(shè)計圖
3.2 多執(zhí)行器負載口獨立液壓系統(tǒng)設(shè)計
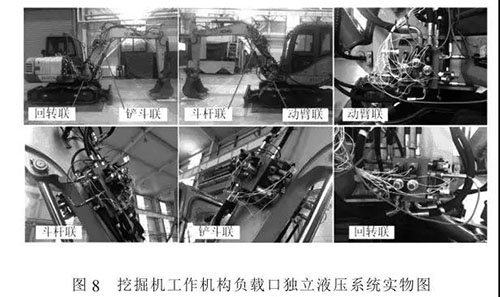
以挖掘機工作機構(gòu)為例, 設(shè)計多執(zhí)行器負載口獨立液壓系統(tǒng),其他工程機械、農(nóng)業(yè)機械與其類似。挖掘機工作機構(gòu)負載口獨立液壓系統(tǒng)原理圖和實物圖如圖 7、圖 8 所示。
挖掘機的工作機構(gòu)包括動臂、斗桿、鏟斗和回轉(zhuǎn), 對應(yīng)的液壓驅(qū)動執(zhí)行器為動臂液壓缸、斗桿液壓桿、鏟斗液壓缸和回轉(zhuǎn)馬達,對于負載口獨立控制閥,最大的特點是其通用性,因此,可以選用同樣的負載口獨立控制閥進行控制,如圖 7 所示,選用四組負載口獨立控制閥 5.1、5.2、5.3 和 5.4 分別控制動臂液壓缸、斗桿液壓桿、鏟斗液壓缸和回轉(zhuǎn)馬達,并將四組閥的供油口 P、負載敏感口 LS 與負載敏感變量泵 7 的出油口 P、負載敏感口 LS 分別相連,將四組閥的回油口 T 與油箱相連,從而構(gòu)成了整個工作機構(gòu)的負載口獨立液壓系統(tǒng)回路。
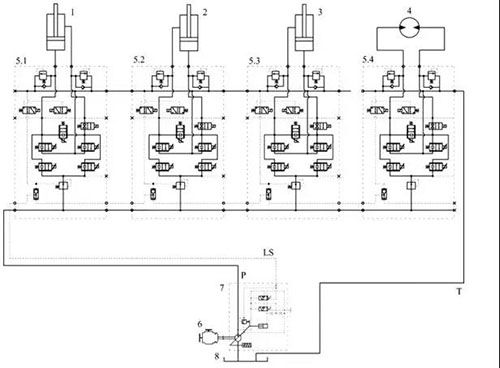
1.動臂液壓缸;2.斗桿液壓缸;3.鏟斗液壓缸;4.回轉(zhuǎn)馬達;5.負載口獨立控制閥動臂聯(lián)、斗桿聯(lián)、鏟斗聯(lián)和回轉(zhuǎn)聯(lián);6.發(fā)動機;
7.負載敏感變量泵;8.油箱。
打開,則壓力油從供油口 P1 或 P2 進油,經(jīng)過壓力補償器 5,再經(jīng)
圖 7 挖掘機工作機構(gòu)負載口獨立液壓系統(tǒng)原理圖
4 結(jié)論:
針對電液壓差補償方法計算量大、方法復(fù)雜、成本高等缺點, 分析了機液壓差補償方法的特點,根據(jù)機液壓差補償原理,采用
5 個二位二通比例閥作為主控制閥,選用壓力補償器對進口控制閥兩端的壓差進行補償,配以梭閥、換向閥、過載補油閥等液壓輔助元件,設(shè)計了基于機液壓差補償?shù)呢撦d口獨立控制閥,并以挖掘機的工作機構(gòu)為例,設(shè)計了挖掘機多執(zhí)行器負載口獨立液壓系統(tǒng),并制造與安裝了相關(guān)液壓元件,搭建了試驗平臺,為后續(xù)負載口獨立液壓系統(tǒng)的控制特性研究提供了良好基礎(chǔ)。
基金項目:國家自然科學(xué)基金青年基金項目資助(51805228);江蘇省高等學(xué)校自然科學(xué)基金研究項目資助(18KJB460010);江蘇省高 等學(xué)校大學(xué)生創(chuàng)新訓(xùn)練計劃項目(201811463001Z)
作者簡介: 黃鵬輝(1999—), 男, 河南信陽人, 本科, 研究方向: 液壓系統(tǒng)設(shè)計。
通訊作者: 劉凱磊(1988—), 男, 甘肅嘉峪關(guān)人, 工學(xué)博士, 講師, 研究方向:電液比例控制技術(shù),新型流體元件的開發(fā)與應(yīng)用。
參考文獻:
[1] Backé W. Design systematics and performance of cartridge valve controls [C].International conference on fluid power, tampere, finland. 1987, 3: 1-48.
[2] 丁孺琦,徐兵,張軍輝.負載口獨立控制系統(tǒng)壓力速度復(fù)合控
制的耦合特性[J]. 浙江大學(xué)學(xué)報( 工學(xué)版),2017,51(6):1126- 1134.
[3] 黃偉男,權(quán)龍,黃家海,等.進出口獨立控制液壓挖掘機回轉(zhuǎn)系
統(tǒng)運行特性[J].機械工程學(xué)報,2016,52(20):159-167.
[4] Choi K, Seo J, Nam Y, et al. Energy-saving in Excavators with Application of Independent Metering Valve [J]. Journal of Mechanical Science & Technology, 2015, 29(1):387-395.
[5] Liu Kailei, Gao Yingjie, Tu Zhaohui. Energy saving potential of load sensing system with hydro -mechanical pressure compensa tion and independent metering[J]. International Journal of Fluid Power, 2016, 17(3):173-186.

【興迪源機械液壓技術(shù)優(yōu)勢】
興迪源機械嚴(yán)格按照ISO國際標(biāo)準(zhǔn)質(zhì)量管理體系和5S管理標(biāo)準(zhǔn)進行質(zhì)量監(jiān)控和內(nèi)部管理。建立有 “河南省流體壓力成形智能裝備工程技術(shù)研究中心”,核心團隊由數(shù)10名博士、碩士和各高等院校金屬成形專家教授組成,專注于液壓成形核心技術(shù)和產(chǎn)品工藝研發(fā)。
興迪源機械與中國科學(xué)院金屬研究所、南京航空航天大學(xué)等院校開展長期的產(chǎn)、學(xué)、研合作,并共同設(shè)立了“液壓成形技術(shù)產(chǎn)業(yè)化示范基地”,時刻跟蹤國內(nèi)外領(lǐng)先技術(shù),不斷提升“興迪源”液壓設(shè)備品牌價值。